![]()
|
|
|
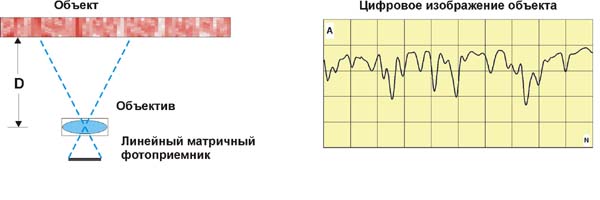
| Принцип работы оптического измерителя основан на регистрации изображения движущегося объекта. Схематично измеритель показан на рисунке 1 и представляет собой цифровую оптическую камеру, в состав которой входят объектив, линейный матричный фотоприемник и блок электроники. С помощью объектива на линейном матричном фотоприемнике формируется изображение участка поверхности объекта. Это изображение считывается и оцифровывается. Фактически эта часть функционирования измерителя аналогична работе современного цифрового фотоаппарата.
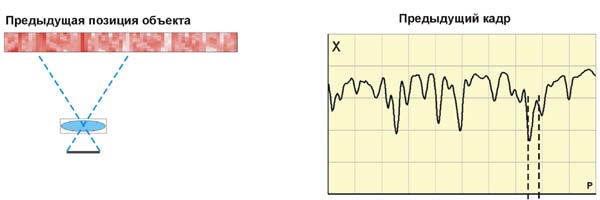
Рис.1. Цифровое изображение поверхности объекта. Сущность, используемого для регистрации перемещения объекта, метода состоит в следующем. Оптическая камера производит непрерывную и покадровую регистрацию участка поверхности объекта, который находится в поле зрения камеры. Для обнаружения перемещения объекта необходимо сравнить два кадра полученные оптической камерой через некоторый интервал времени Δt. В случае, когда объект неподвижен, различие между двумя кадрами минимально. При перемещении объекта, характерные участки текущего изображения будут смещены относительно предыдущего изображения. На рисунке 2 приведены два последовательных кадра, полученных при перемещении объекта. Сравнивая два полученных таким образом кадра можно обнаружить и рассчитать перемещение изображения объекта на линейном матричном фотоприемнике.
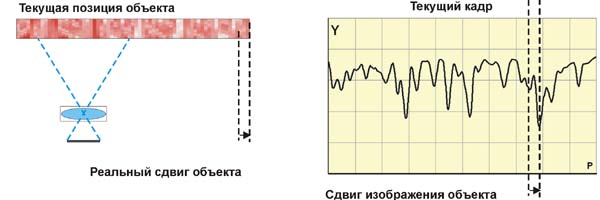
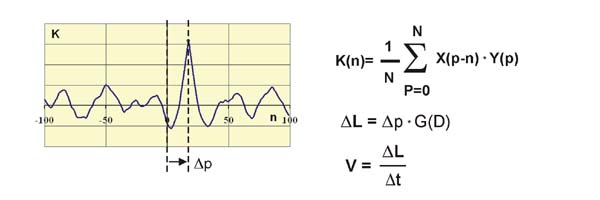
Рис.2. Два последовательных кадра полученных при движении объекта. Для сравнения кадров используются хорошо известные методы корреляционного анализа. В первом кадре выбирается пиксельное окно шириной N. Во втором кадре также выбирается пиксельное окно ширины N, но смещенное относительно первого на величину n. По известной формуле рассчитывается зависимость корреляционной функции K(n) от параметра n. На рисунке 3 показана зависимость функции K(n), для двух кадров приведенных на рисунке 2.
Рис.3. Корреляционная функция для двух последовательных кадров. Положение максимума функции K(n) определяет межкадровый сдвиг изображения Δp. Для получения реального перемещения ΔL объекта необходимо учитывать оптическое увеличение объектива G (которое зависит от расстояния D до объекта). Зная расстояние D нетрудно получить скорость объекта. |
|
Last modified: марта 28, 2016 |